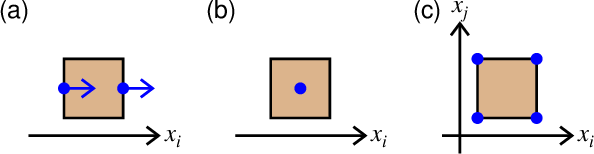
図1. 格子セルに対する変数の定義位置。 (a)速度\(V_i^k\)と等価体積力\(f_i\)、 (b)応力の対角成分\(\tau_{ii}^l\)、 (c)応力の非対角成分\(\tau_{ij}^l\), \(i\neq j\)。
Fig. 1. Definition points of variables relative to a grid cell. (a) The velocity \(V_i^k\) and equivalent body force \(f_i\), (b) diagonal stress components \(\tau_{ii}^l\), (c) off-diagonal stress components \(\tau_{ij}^l\), \(i\neq j\).